Project Overview
The French Robotic Cup (Coupe de France de Robotique) is an annual competition that challenges teams to build autonomous robots capable of performing complex tasks in a structured environment. Our team of 11 engineering students spent approximately one year developing a fully autonomous robot designed to navigate a defined arena and manipulate objects according to the competition’s specific requirements.
This comprehensive project integrated multiple engineering disciplines, including mechanical design, computer vision, autonomous navigation, and real-time control systems. The competition provided an excellent opportunity to apply theoretical knowledge to a practical, time-constrained engineering challenge.
Robot and Environment
| Our robot | Competition arena |
|---|---|
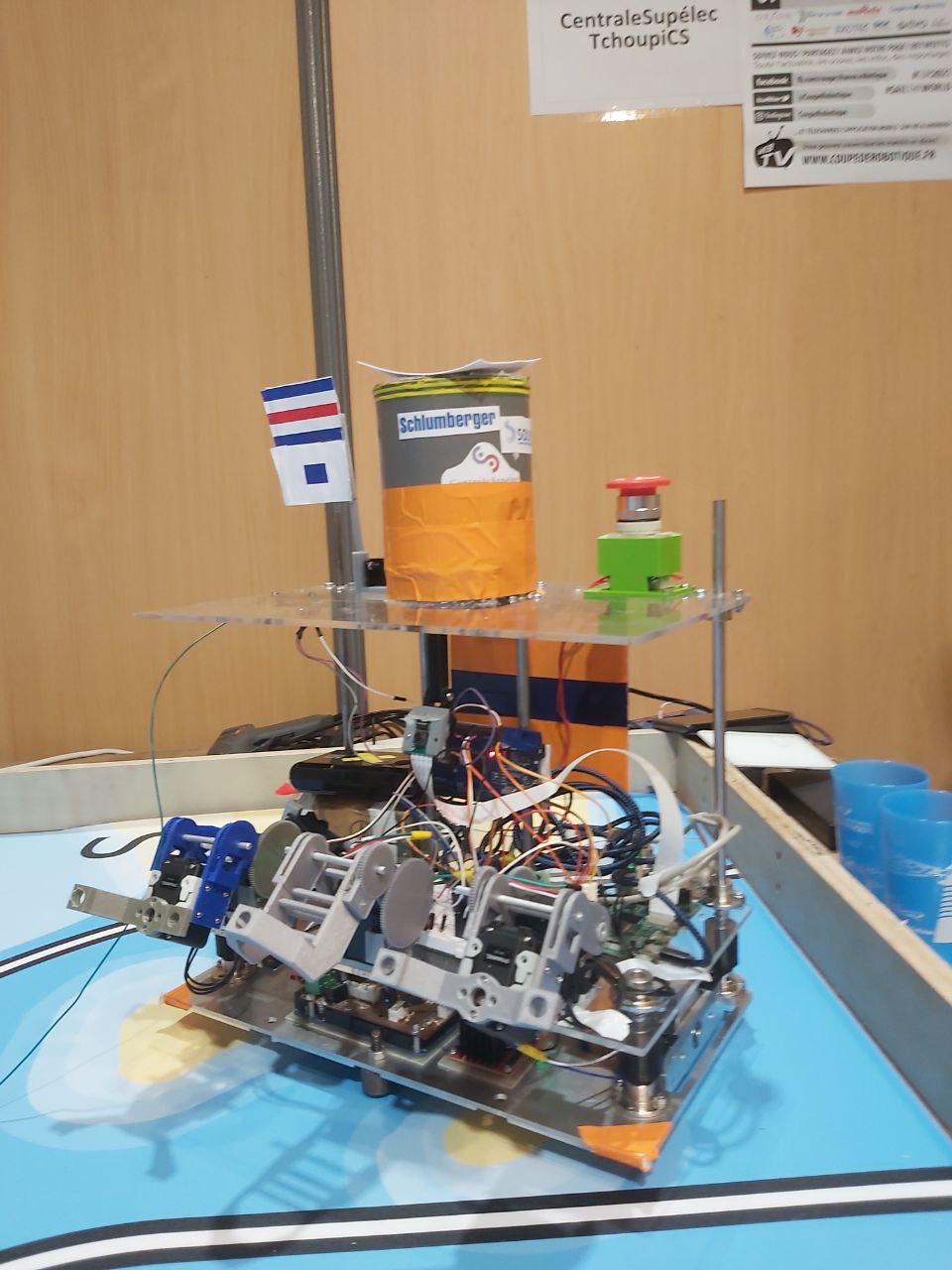 |
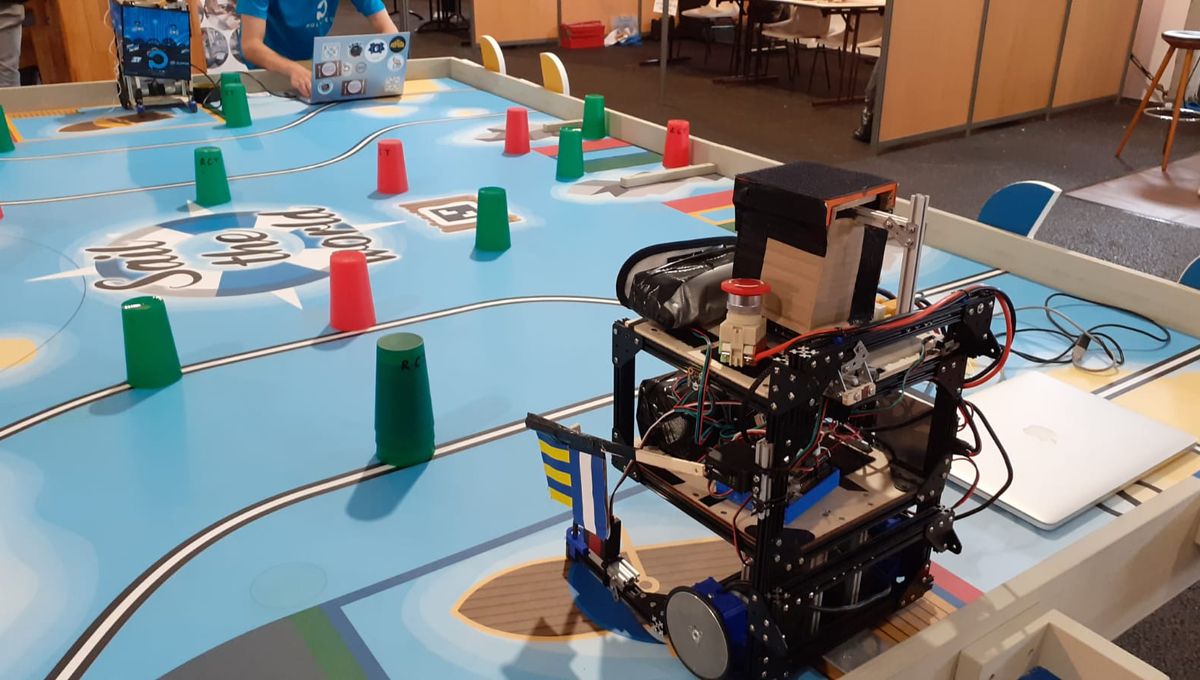 |
The competition arena featured a structured environment with specific zones, obstacles, and target objects that robots needed to identify and manipulate. Our robot was equipped with multiple sensors, including cameras and a LiDAR, to navigate and interact with the environment autonomously.
Technical Contributions
I was responsible for developing the visual perception system that enabled our robot to understand its environment and locate objects of interest.
Vision System Architecture
The system utilized a single overhead camera positioned above the competition arena, providing a bird’s-eye view of the entire playing field. This setup offered several advantages:
- Complete environmental awareness: The omniscient perspective eliminated blind spots
- Simplified coordinate mapping: Direct transformation from image coordinates to world coordinates
- Real-time processing: Single camera reduced computational overhead
Aruco Marker Detection and Localization
The core of my contribution involved implementing robust Aruco marker detection and interpretation:
- Robot identification: Each robot had a unique Aruco marker on its top surface, enabling precise identification and tracking
- Environmental calibration: Strategic placement of reference markers throughout the arena provided spatial calibration points
From these, I could get the position of the robot in the arena.
-
Previous
Infering Genes Links with Unsupervised Methods -
Next
Neural Style Transfer and Perceptual Loss